Cartographer建图问题
本文共 500 字,大约阅读时间需要 1 分钟。
目前手上只有个16线的激光雷达,想在房间跑一下建图,目的是能够跑通就可以.
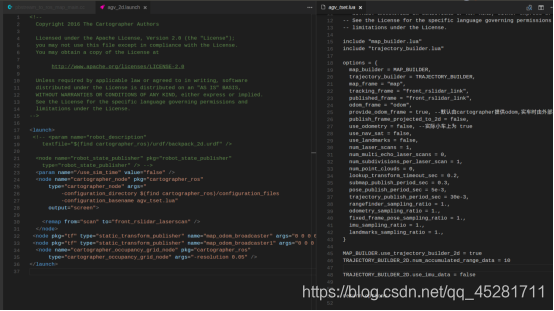
1,启动激光雷达, 2,将激光雷达3d点云转成2d laserscan数据类型 3,启动cartographer包roslaunch cartographer_ros agv_2d.launchCartographer配置:
终端报错:

百度谷歌了一大圈:
都说是 的问题,我把它设置成false或者注释掉都不好使.大佬可有遇到过这种情况吗?解决:
激光雷达里面设置的仿真时间,去掉之后就好<arg name="time_synchronization" default="false" /> 来cartographer launch里面这个要打开,这是显示map的节点!!!
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros" type="cartographer_occupancy_grid_node" args="-resolution 0.05" /> cartographer包中的任何文件改动后均需要重新编译运行!!!
转载地址:http://fmntz.baihongyu.com/
你可能感兴趣的文章
Netty基础—8.Netty实现私有协议栈一
查看>>
Netty基础—8.Netty实现私有协议栈二
查看>>
Netty多线程 和 Redis6 多线程对比
查看>>
Netty学习总结(1)——Netty入门介绍
查看>>
Netty学习总结(2)——Netty的高性能架构之道
查看>>
Netty学习总结(3)——Netty百万级推送服务
查看>>
Netty学习总结(4)——图解Netty之Pipeline、channel、Context之间的数据流向
查看>>
Netty学习总结(5)——Netty之TCP粘包/拆包问题的解决之道
查看>>
Netty学习总结(6)——Netty使用注意事项
查看>>
Netty实现Http服务器
查看>>
Netty客户端断线重连实现及问题思考
查看>>
Netty工作笔记0001---Netty介绍
查看>>
Netty工作笔记0003---IO模型-BIO-Java原生IO
查看>>
Netty工作笔记0005---NIO介绍说明
查看>>
Netty工作笔记0006---NIO的Buffer说明
查看>>
Netty工作笔记0007---NIO的三大核心组件关系
查看>>
Netty工作笔记0008---NIO的Buffer的机制及子类
查看>>
Netty工作笔记0009---Channel基本介绍
查看>>
Netty工作笔记0010---Channel应用案例1
查看>>
Netty工作笔记0011---Channel应用案例2
查看>>